
GNSS
Global Navigation Satellite Systems
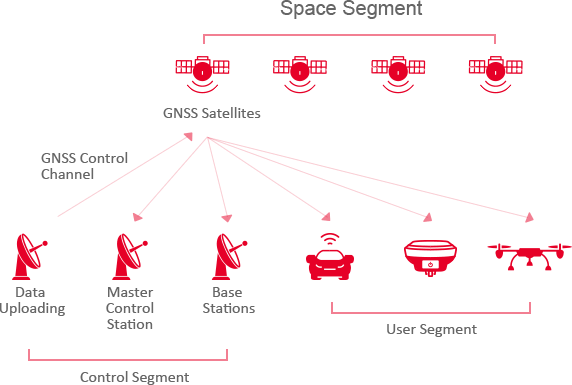
GNSS Segments
Space Segment
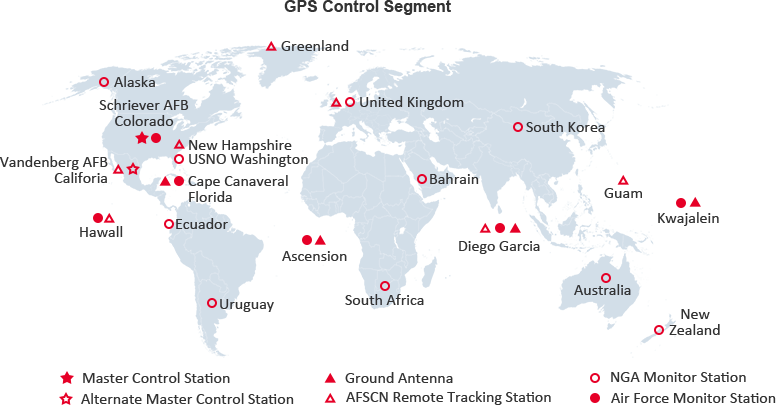
Control Segment
User Segment
Space Segment

 |
GPS | Global Positioning System | United States | 27 satellites |
 |
GLONASS | Globalnaya navigatsionnaya sputhikovaya sistema | Russia | 24 satellites |
 |
Galileo | Europe's own global navigation satellite system | European Union | 27 satellites |
 |
BeiDou | BeiDou Navigation Satellite System | China | 35 satellites |
 |
QZSS | Quasi-Zenith Satellite System | Japan | 3 satellites |
 |
IRNSS | Indian Regional Navigation Satellite System | India | 7 satellites |

User Segments
Hardware
Software & Firmware
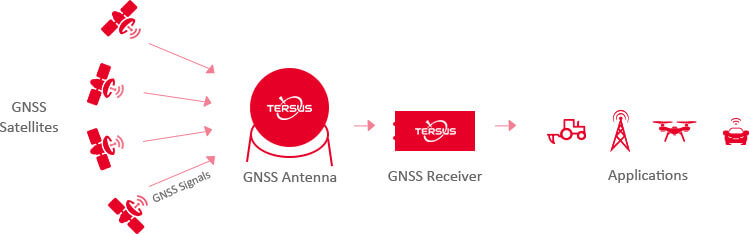
GNSS Receiver Functions
Acquire GNSS signals
Measure and track signals
Recover navigational data
Structure of GNSS Receiver

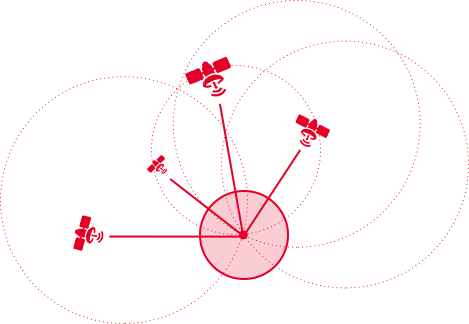
GNSS Positioning
Satellite-based positioning relies on measuring the distances between satellites and receivers. With known satellite positions and measured distances between satellites and a receiver, the receiver’s coordinates can be calculated. However, the electromagnetic signals emitted by satellites are disrupted by atmospheric and clock errors, which degrade GNSS positioning accuracy.
GNSS Error Sources
Contributing Source & Error Range
-

System noise
≈2m -

Ephemeris
≈1m -

Satellite clock
≈1m -

Multipath
≈2m -

Tropospheric delay
≈2m -

lonospheric delay
≈10m -

S/A
≈70m -

Human and software errors
≈2m
Multi-frequency
Multi-corstellation

Multi-frequency
Receivers which support multi-frequency satellite signals are one of the most effective ways to resolve ionospheric errors within position calculations.
Multi-constellation
Receivers which support multi-GNSS can access signals from several satellite constellations. The use of multi-GNSS receivers contribute to decreasing signal acquisition time, improving position accuracy, and reducing the problems caused by obstructions such as trees and buildings.
GNSS Positioning
There are two types of positioning modes. One is point position and the other is relative position. Point positioning includes standard point positioning (SPP) and precise point positioning (PPP). Their major difference is whether they use carrier phase observation.
Relative positioning also includes two types: DGPS and RTK. Their difference is that the latter uses carrier phase observations as well. Relative positioning cancels most error sources in distance measurement by exploiting the signal differences between two receivers, so it is simpler and more reliable, but it only measures relative position. In practice, the coordinate of the reference receiver is fixed and known.
Relative positioning also includes two types: DGPS and RTK. Their difference is that the latter uses carrier phase observations as well. Relative positioning cancels most error sources in distance measurement by exploiting the signal differences between two receivers, so it is simpler and more reliable, but it only measures relative position. In practice, the coordinate of the reference receiver is fixed and known.
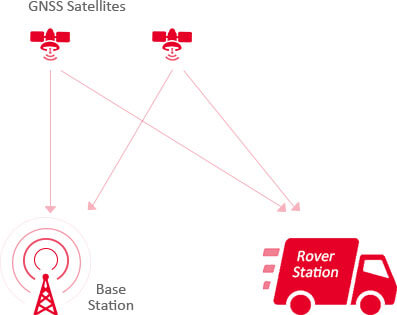
Code Differential
A GNSS receiver is fixed as a base station for which its location is known. The base station receives GNSS signals, calculates pseudo ranges to satellites and determines range errors. The base station transmits corrections to rovers through data links. The rovers receive GNSS signals, calculate pseudo ranges and apply corrections, which are used to determine their positions.
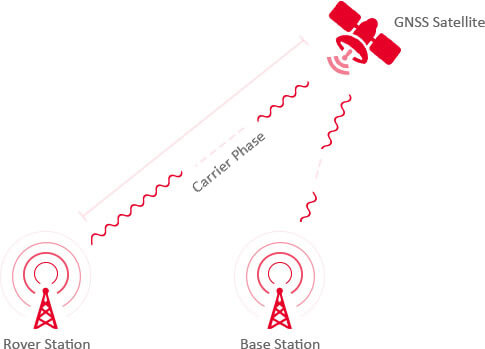
Real-time Kinematic (RTK)
RTK is a carrier phase-based relative positioning technique, which provides 1-3cm positioning solution accuracy instantaneously. It handles most error sources by employing double differenced observations and recovers the integer nature of carrier phase ambiguity. Its performance depends on the length of the baseline between the user and the reference station. RTK is the most popular GNSS-based precise positioning technique available.
Network RTK
Network RTK is based on the use of several widely spaced permanent stations. Data from reference stations is
combined in a common data processing in a control center. The control center computes corrections for the spatially correlated errors within the network. These corrections are transmitted to the rover. Comparing to single station RTK, the advantages of network RTK is better modeling of spatially correlated errors over larger distance, which the distance
between rover and reference station can be increased.