- Product
- News
- Document
- Software
- Use Case
- ReIease Note
- Video
- FAQs
- Other
-
 AX4E02 Geodetic AntennaLearn More >
AX4E02 Geodetic AntennaLearn More > -
 Oscar Trek GNSS ReceiverLearn More >
Oscar Trek GNSS ReceiverLearn More > -
 LUKA GNSS ReceiverLearn More >
LUKA GNSS ReceiverLearn More > -
 TC80 ControllerLearn More >
TC80 ControllerLearn More > -
 UAV PPK SolutionLearn More >
UAV PPK SolutionLearn More > -
 UAV PPK Solution with BaseLearn More >
UAV PPK Solution with BaseLearn More > -
 AX4E03 Aviation AntennaLearn More >
AX4E03 Aviation AntennaLearn More > -
 AX4E05 Helix AntennaLearn More >
AX4E05 Helix AntennaLearn More > -
 AX4E06M 3D Mini Choke Ring AntennaLearn More >
AX4E06M 3D Mini Choke Ring AntennaLearn More > -
 AX4E07 High Performance Antenna for Autonomous ApplicationsLearn More >
AX4E07 High Performance Antenna for Autonomous ApplicationsLearn More > -
 AX3703 Aviation AntennaLearn More >
AX3703 Aviation AntennaLearn More > -
 AX3705 Helix AntennaLearn More >
AX3705 Helix AntennaLearn More > -
 AX3706 3D Choke Ring AntennaLearn More >
AX3706 3D Choke Ring AntennaLearn More > -
 Oscar GNSS ReceiverLearn More >
Oscar GNSS ReceiverLearn More > -
 Oscar ProBase GNSS ReceiverLearn More >
Oscar ProBase GNSS ReceiverLearn More > -
 TC40 ControllerLearn More >
TC40 ControllerLearn More > -
 TC50 ControllerLearn More >
TC50 ControllerLearn More > -
 TC20 ControllerLearn More >
TC20 ControllerLearn More > -
 Oscar GNSS Receiver with OptionsLearn More >
Oscar GNSS Receiver with OptionsLearn More > -
 RS460H 2W Radio Wireless Data TransceiverLearn More >
RS460H 2W Radio Wireless Data TransceiverLearn More > -
 RS400H3 External 28W RadioLearn More >
RS400H3 External 28W RadioLearn More > -
 TP688 Industrial Modem for Ntrip CorrectionsLearn More >
TP688 Industrial Modem for Ntrip CorrectionsLearn More > -
 RTR Rod-Tip-RollerLearn More >
RTR Rod-Tip-RollerLearn More > -
 David30 GNSS ReceiverLearn More >
David30 GNSS ReceiverLearn More > -
 David30-D GNSS ReceiverLearn More >
David30-D GNSS ReceiverLearn More > -
 INS200Learn More >
INS200Learn More > -
 Rover Kit Network ModeLearn More >
Rover Kit Network ModeLearn More > -
 Rover Kit with 2W RadioLearn More >
Rover Kit with 2W RadioLearn More > -
 Base Kit Network ModeLearn More >
Base Kit Network ModeLearn More > -
 Base Kit with 2W RadioLearn More >
Base Kit with 2W RadioLearn More > -
 Base Kit with 28W RadioLearn More >
Base Kit with 28W RadioLearn More > -
 Tersus GeoBee30Learn More >
Tersus GeoBee30Learn More > -
 Tersus GeoBeeLearn More >
Tersus GeoBeeLearn More > -
 BX306 GNSS KitLearn More >
BX306 GNSS KitLearn More > -
 BX306 GNSS UAV KitLearn More >
BX306 GNSS UAV KitLearn More > -
 BX316D GNSS KitLearn More >
BX316D GNSS KitLearn More > -
 BX316D GNSS UAV KitLearn More >
BX316D GNSS UAV KitLearn More > -
 AG992-ProLearn More >
AG992-ProLearn More > -
 MatrixRTK ReceiverLearn More >
MatrixRTK ReceiverLearn More > -
 Tersus GeoCasterLearn More >
Tersus GeoCasterLearn More > -
 Tersus Nuwa AppLearn More >
Tersus Nuwa AppLearn More > -
 Tersus GNSS CenterLearn More >
Tersus GNSS CenterLearn More > -
 Tersus PNW SoftwareLearn More >
Tersus PNW SoftwareLearn More > -
 Tersus Metaverse PainterLearn More >
Tersus Metaverse PainterLearn More > -
 TAS-Z1 Total StationLearn More >
TAS-Z1 Total StationLearn More > -
 TheDuck™Learn More >
TheDuck™Learn More > -
 Precise CorrectionLearn More >
Precise CorrectionLearn More >
Anywhere and Anytime -
 BX50L-TAPLearn More >
BX50L-TAPLearn More > -
 BX50M-TAPLearn More >
BX50M-TAPLearn More >
-
 Mar 14, 2018Tersus Takes New Stride into Surveying with David GNSS ReceiverTersus is bringing surveying applications to next level with the launch of Tersus David, a GNSS Receiver in the global markets.
Mar 14, 2018Tersus Takes New Stride into Surveying with David GNSS ReceiverTersus is bringing surveying applications to next level with the launch of Tersus David, a GNSS Receiver in the global markets. -
 Feb 08, 2018Tersus Makes Debut at IGNSS in Australia and Showcases High Precision GNSS ReceiversAt the International Global Navigation Satellite Systems IGNSS 2018 conference in Sydney, Tersus made debut and introduced David, NeoRTK and MatrixRTK, etc.
Feb 08, 2018Tersus Makes Debut at IGNSS in Australia and Showcases High Precision GNSS ReceiversAt the International Global Navigation Satellite Systems IGNSS 2018 conference in Sydney, Tersus made debut and introduced David, NeoRTK and MatrixRTK, etc. -
 Feb 02, 2018Tersus David Preview: MUST-SEE Highlights Before ShowtimeTersus David is a GNSS receiver to cater the increasing needs of cost-efficient, ease-to-use, lightweight as well as high-precision mobile survey tools.
Feb 02, 2018Tersus David Preview: MUST-SEE Highlights Before ShowtimeTersus David is a GNSS receiver to cater the increasing needs of cost-efficient, ease-to-use, lightweight as well as high-precision mobile survey tools. -
 Jan 29, 2018Meet Tersus GNSS at IGNSS 2018 in SydneyTersus is looking forward to the opportunity to take part in IGNSS 2018 and meeting you there with our latest GNSS product showcase.
Jan 29, 2018Meet Tersus GNSS at IGNSS 2018 in SydneyTersus is looking forward to the opportunity to take part in IGNSS 2018 and meeting you there with our latest GNSS product showcase. -
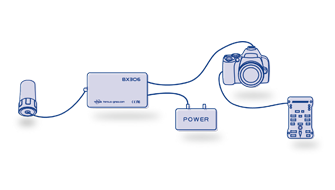
 Jan 24, 2018Tersus Launches BX306Z GNSS RTK Board to Meet the Needs of OEMs and System IntegratorsTersus launched BX306Z GNSS RTK board with powerful flexibility and compatibility to meet or exceed the needs of OEMs and system integrators.
Jan 24, 2018Tersus Launches BX306Z GNSS RTK Board to Meet the Needs of OEMs and System IntegratorsTersus launched BX306Z GNSS RTK board with powerful flexibility and compatibility to meet or exceed the needs of OEMs and system integrators. -
 Nov 29, 2017Announce GNSS OEM Board Firmware V1.16An upgraded version of GNSS RTK & PPK OEM board firmware is available for download. For BX316 and BX 316R, hot mount for SD card is added. Upgrade now.
Nov 29, 2017Announce GNSS OEM Board Firmware V1.16An upgraded version of GNSS RTK & PPK OEM board firmware is available for download. For BX316 and BX 316R, hot mount for SD card is added. Upgrade now. -
 Nov 09, 2017Upgrade to GNSS OEM Board Firmware V1.15OEM boards firmware updated. All update improves RTK positioning performance and high-precision navigation in more challenging environments.
Nov 09, 2017Upgrade to GNSS OEM Board Firmware V1.15OEM boards firmware updated. All update improves RTK positioning performance and high-precision navigation in more challenging environments. -
 Oct 27, 2017RTKLIB SupportsRTKLIB consists of a portable program library and several APs (application programs) utilizing the library. And now it supports "Tersus" format.
Oct 27, 2017RTKLIB SupportsRTKLIB consists of a portable program library and several APs (application programs) utilizing the library. And now it supports "Tersus" format. -
 Sep 26, 2017Tersus GNSS Showcases Its Innovative RTK Solutions at InterGEO 2017, BerlinTersus is launching its proprietary RTK technology and integrated solutions, the Tersus David RTK box as well as the Precis GNSS Boards & Receivers, today at InterGEO 2017.
Sep 26, 2017Tersus GNSS Showcases Its Innovative RTK Solutions at InterGEO 2017, BerlinTersus is launching its proprietary RTK technology and integrated solutions, the Tersus David RTK box as well as the Precis GNSS Boards & Receivers, today at InterGEO 2017. -
 Sep 06, 2017Tersus Announces New GNSS RTK System [NeoRTK] for Surveying at InterDrone 2017Tersus announced its latest GNSS RTK System, the NeoRTK system at InterDrone.
Sep 06, 2017Tersus Announces New GNSS RTK System [NeoRTK] for Surveying at InterDrone 2017Tersus announced its latest GNSS RTK System, the NeoRTK system at InterDrone. -
 Sep 06, 2017Tersus Launches New Version of BX306 RTK Board at InterDrone 2017Tersus announced a major upgrade to its popular BX306 RTK board with new and improved GPS/GLONASS functionality today.
Sep 06, 2017Tersus Launches New Version of BX306 RTK Board at InterDrone 2017Tersus announced a major upgrade to its popular BX306 RTK board with new and improved GPS/GLONASS functionality today. -
 Aug 09, 2017Join Us at 2017 IASEXPO [Berlin, Germany)] [Booth #C6 A029]Join Tersus at IASEXPO (the InterAerial Solutions as part of InterGEO) in Berlin and discover the power of Precis GNSS RTK boards and GNSS-aided inertial navigation system for drone-related applications.
Aug 09, 2017Join Us at 2017 IASEXPO [Berlin, Germany)] [Booth #C6 A029]Join Tersus at IASEXPO (the InterAerial Solutions as part of InterGEO) in Berlin and discover the power of Precis GNSS RTK boards and GNSS-aided inertial navigation system for drone-related applications. -
 Jul 11, 2017Visit Us at 2017 InterGEO [Berlin, Germany)] [Booth #C4 060]Tersus is looking forward to meeting you at the InterGEO 2017 (Berlin, Germany) on September 26 to 28.
Jul 11, 2017Visit Us at 2017 InterGEO [Berlin, Germany)] [Booth #C4 060]Tersus is looking forward to meeting you at the InterGEO 2017 (Berlin, Germany) on September 26 to 28. -
 Jul 07, 2017Meet Us @ InterDrone 2017 [Las Vegas, United States] [Booth #905]Visit our booth #905 at InterDrone from September 6 to 8 at Rio, Las Vegas, United States.
Jul 07, 2017Meet Us @ InterDrone 2017 [Las Vegas, United States] [Booth #905]Visit our booth #905 at InterDrone from September 6 to 8 at Rio, Las Vegas, United States. -
 May 31, 2017Interview by GIM: 5 Questions to Xiaohua Wen, CEO of Tersus GNSSThe GNSS industry is a very dynamic market full of growth opportunities, as several reports confirm. In China, Tersus GNSS is one of the ambitious companies looking to expand in the international GNSS business.
May 31, 2017Interview by GIM: 5 Questions to Xiaohua Wen, CEO of Tersus GNSSThe GNSS industry is a very dynamic market full of growth opportunities, as several reports confirm. In China, Tersus GNSS is one of the ambitious companies looking to expand in the international GNSS business. -
 May 04, 2017Supported LiDAR USA to Achieve High Precision ApplicationKevin Dennehy, in his latest article [Hovering in High Performance UAS-based LiDAR Space] of Inside Unmanned Systems, Apr-May issue, mentioned that, “LiDAR USA has developed a lightweight LiDAR specifically for unmanned aircraft that is capable of getting
May 04, 2017Supported LiDAR USA to Achieve High Precision ApplicationKevin Dennehy, in his latest article [Hovering in High Performance UAS-based LiDAR Space] of Inside Unmanned Systems, Apr-May issue, mentioned that, “LiDAR USA has developed a lightweight LiDAR specifically for unmanned aircraft that is capable of getting -
 Apr 28, 2017Meet Us at 2017 China Satellite Navigation Conference2017 China Satellite Navigation Conference (CSNC) is underway. Come visit us at CSNC from May 23~25 in Shanghai. We’ll be at booth E2-3 and we’re happy to show you the latest products.
Apr 28, 2017Meet Us at 2017 China Satellite Navigation Conference2017 China Satellite Navigation Conference (CSNC) is underway. Come visit us at CSNC from May 23~25 in Shanghai. We’ll be at booth E2-3 and we’re happy to show you the latest products. -
 Apr 17, 2018Join Tersus at AUVSI Xponential, May 1 to 3, 2018Tersus is going to showcase new GNSS solutions for Drones at World’s Largest UAV Exhibition AUVSI Xponential 2018.
Apr 17, 2018Join Tersus at AUVSI Xponential, May 1 to 3, 2018Tersus is going to showcase new GNSS solutions for Drones at World’s Largest UAV Exhibition AUVSI Xponential 2018. -
 Apr 27, 2018Meet Us at 2018 China Satellite Navigation Conference [Booth T9]2018 China Satellite Navigation Conference (CSNC) is underway. Want to learn more about Tersus and our latest GNSS technology? Come visit us at CSNC from May 23~25 in Harbin. We’ll be at booth T9 and we’re happy to show you the latest products.
Apr 27, 2018Meet Us at 2018 China Satellite Navigation Conference [Booth T9]2018 China Satellite Navigation Conference (CSNC) is underway. Want to learn more about Tersus and our latest GNSS technology? Come visit us at CSNC from May 23~25 in Harbin. We’ll be at booth T9 and we’re happy to show you the latest products. -
 Aug 21, 2018Tersus Introduces a Practical Solution for UAV PPK ApplicationsThe Tersus UAV PPK solution includes BX316R PPK Receiver, AX3705 Helix Antenna, and Tersus GeoPix Software.
Aug 21, 2018Tersus Introduces a Practical Solution for UAV PPK ApplicationsThe Tersus UAV PPK solution includes BX316R PPK Receiver, AX3705 Helix Antenna, and Tersus GeoPix Software. -
 Oct 18, 2018Tersus Debuts Brand-new RTK receiver, Oscar, With Calibration-free Compensation at InterGEO 2018Tersus unveiled its proprietary RTK technology and integrated solutions, the Tersus Oscar RTK Receiver as well as the BX-series GNSS Boards & Receivers, at InterGEO 2018.
Oct 18, 2018Tersus Debuts Brand-new RTK receiver, Oscar, With Calibration-free Compensation at InterGEO 2018Tersus unveiled its proprietary RTK technology and integrated solutions, the Tersus Oscar RTK Receiver as well as the BX-series GNSS Boards & Receivers, at InterGEO 2018. -
 Nov 26, 2018Tersus Introduces Oscar GNSS Receiver, a brand new generation GNSS RTK systemShanghai, Nov 26, 2018 - Tersus GNSS Inc. (“Tersus”), a leading provider of centimeter-accuracy GNSS RTK solutions, is bringing surveying applications to next level with the launch of Tersus Oscar, a new generation GNSS RTK system.
Nov 26, 2018Tersus Introduces Oscar GNSS Receiver, a brand new generation GNSS RTK systemShanghai, Nov 26, 2018 - Tersus GNSS Inc. (“Tersus”), a leading provider of centimeter-accuracy GNSS RTK solutions, is bringing surveying applications to next level with the launch of Tersus Oscar, a new generation GNSS RTK system. -
 Jan 10, 2019Tersus Releases GeoCaster Software, a Cost-effective Caster Software for NTRIP CorrectionsTersus GNSS Inc. today released the Tersus GeoCaster, which is a Networked Transport of RTCM via Internet Protocol (NTRIP) Caster Software to expand its product line and provide users with better and more comprehensive services.
Jan 10, 2019Tersus Releases GeoCaster Software, a Cost-effective Caster Software for NTRIP CorrectionsTersus GNSS Inc. today released the Tersus GeoCaster, which is a Networked Transport of RTCM via Internet Protocol (NTRIP) Caster Software to expand its product line and provide users with better and more comprehensive services. -
 Feb 22, 2019Notice on GPS Week Number Rollover - 6 April 2019The GNSS receivers manufactured by Tersus GNSS Inc. can be used normally when the GPS week number rollover happens. They are not affected by this event and do not need to be upgraded.
Feb 22, 2019Notice on GPS Week Number Rollover - 6 April 2019The GNSS receivers manufactured by Tersus GNSS Inc. can be used normally when the GPS week number rollover happens. They are not affected by this event and do not need to be upgraded. -
 Mar 26, 2019Tersus Launches David Plus, a Dual-antenna GNSS Receiver with HeadingTersus recently launched its new David Plus receiver, a dual-antenna GNSS receiver which offers centimeter-accurate positioning and heading.
Mar 26, 2019Tersus Launches David Plus, a Dual-antenna GNSS Receiver with HeadingTersus recently launched its new David Plus receiver, a dual-antenna GNSS receiver which offers centimeter-accurate positioning and heading. -
 Apr 10, 2019Tersus GNSS Showcases Its Innovative RTK Receivers at Locate19, MelbourneLocated19 has been a very inspiring event, we are thrilled to meet all the spatial industry professionals and end-users of innovativetechnology.
Apr 10, 2019Tersus GNSS Showcases Its Innovative RTK Receivers at Locate19, MelbourneLocated19 has been a very inspiring event, we are thrilled to meet all the spatial industry professionals and end-users of innovativetechnology. -
 Sep 20, 2019Live Demonstration of Oscar Receiver with Calibration-free Compensation Caused a Great Attention at InterGEO 2019Stuttgart, September 17-19, 2019 - Tersus GNSS Inc. (“Tersus”), a leading GNSS solution provider, has showcased its proprietary RTK technology and integrated solutions, the Tersus Oscar RTK Receiver along with the BX-series GNSS Boards & Receivers and oth
Sep 20, 2019Live Demonstration of Oscar Receiver with Calibration-free Compensation Caused a Great Attention at InterGEO 2019Stuttgart, September 17-19, 2019 - Tersus GNSS Inc. (“Tersus”), a leading GNSS solution provider, has showcased its proprietary RTK technology and integrated solutions, the Tersus Oscar RTK Receiver along with the BX-series GNSS Boards & Receivers and oth -
 Nov 27, 2019Happy Thanksgiving!To share our genuine appreciation for you, a notebook and a USB Flash Drive will be given to you as freebies for each Oscar and David GNSS Receiver you are going to order from Thanksgiving to New Year's Day.
Nov 27, 2019Happy Thanksgiving!To share our genuine appreciation for you, a notebook and a USB Flash Drive will be given to you as freebies for each Oscar and David GNSS Receiver you are going to order from Thanksgiving to New Year's Day. -
 Feb 26, 2020Geospatial Data Must for More Efficient SocietyThe world is always developing and growing, but at different times, it has different manifestations. The phenomenon of global recession means that the production efficiency needs to be boosted. Geospatial data and technologies, like highly accurate positi
Feb 26, 2020Geospatial Data Must for More Efficient SocietyThe world is always developing and growing, but at different times, it has different manifestations. The phenomenon of global recession means that the production efficiency needs to be boosted. Geospatial data and technologies, like highly accurate positi -
 Jan 31, 2020GNSS Trends of 2020 - 4 Constellation with Triple Frequencies in the SkyTriple-frequency observations for high accuracy positioning has been studied for long time. It’s proven to improve RTK performance (fix rate, reliability, precision) greatly in some challenging scenarios for dual-frequency RTK, say very lone base line, ve
Jan 31, 2020GNSS Trends of 2020 - 4 Constellation with Triple Frequencies in the SkyTriple-frequency observations for high accuracy positioning has been studied for long time. It’s proven to improve RTK performance (fix rate, reliability, precision) greatly in some challenging scenarios for dual-frequency RTK, say very lone base line, ve -
 Mar 23, 2020COVID-19 (Coronavirus) Business UpdateOur teams are continuing their efforts to meet your customer requests in the coming days and weeks. Let’s stay connected to discuss your concerns, find the answers to your questions together. Let us know if you have any additional requirements.
Mar 23, 2020COVID-19 (Coronavirus) Business UpdateOur teams are continuing their efforts to meet your customer requests in the coming days and weeks. Let’s stay connected to discuss your concerns, find the answers to your questions together. Let us know if you have any additional requirements. -
 Jun 03, 2020Tersus Introduces BX40C RTK Board, A Compact GNSS Board with Full Constellation TrackingShanghai, June 3, 2020 - Tersus GNSS Inc. (Tersus) announced the release of the BX40C RTK Board to support its series of GNSS boards and provide high accuracy, fast positioning services.
Jun 03, 2020Tersus Introduces BX40C RTK Board, A Compact GNSS Board with Full Constellation TrackingShanghai, June 3, 2020 - Tersus GNSS Inc. (Tersus) announced the release of the BX40C RTK Board to support its series of GNSS boards and provide high accuracy, fast positioning services. -
 Jan 25, 2021Tersus GNSS 7th Anniversary Celebration25 January, today is the 7th anniversary of Tersus GNSS Inc.
Jan 25, 2021Tersus GNSS 7th Anniversary Celebration25 January, today is the 7th anniversary of Tersus GNSS Inc.
The CEO Wen Xiaohua said that on this special day, he thanked the users and partners for their continuous love and support to Tersus. -
 Apr 20, 2021New Choice of ControllerStarting today, you got a new choice of controller! -Tersus TC50 Controller!
Apr 20, 2021New Choice of ControllerStarting today, you got a new choice of controller! -Tersus TC50 Controller! -
 Apr 30, 2021Tersus GNSS & Spatial Technologies Announce Strategic PartnershipTersus GNSS is thrilled to announce a new global strategic partnership with Spatial Technologies, combining Tersus's industry leading GNSS RTK products and innovative solutions with Spatial Technologies's effective enterprise delivery and reliable technol
Apr 30, 2021Tersus GNSS & Spatial Technologies Announce Strategic PartnershipTersus GNSS is thrilled to announce a new global strategic partnership with Spatial Technologies, combining Tersus's industry leading GNSS RTK products and innovative solutions with Spatial Technologies's effective enterprise delivery and reliable technol -
 Aug 27, 2021185 Oscar GNSS receivers- Tersus GNSS wins the largest order in Nigeria!Tersus GNSS wins the largest order of 185 Oscar GNSS receivers in Nigeria and it is officially endorsed by NIS (Nigeria Institute of Surveyors). Started in 1934, NIS is the oldest organized bodies in Nigeria as well as the umbrella professional organizati
Aug 27, 2021185 Oscar GNSS receivers- Tersus GNSS wins the largest order in Nigeria!Tersus GNSS wins the largest order of 185 Oscar GNSS receivers in Nigeria and it is officially endorsed by NIS (Nigeria Institute of Surveyors). Started in 1934, NIS is the oldest organized bodies in Nigeria as well as the umbrella professional organizati -
 May 10, 2022Tersus GNSS releases the ExtremeRTKTM Technology White PaperTersus GNSS released its ExtremeRTKTM Technology White Paper today, which demonstrates how it delivers excellent performance in all manner of surveying scenarios and how impressive the compensated results are when performing tilt survey--even t
May 10, 2022Tersus GNSS releases the ExtremeRTKTM Technology White PaperTersus GNSS released its ExtremeRTKTM Technology White Paper today, which demonstrates how it delivers excellent performance in all manner of surveying scenarios and how impressive the compensated results are when performing tilt survey--even t -
 May 26, 2022Tersus GNSS Participated in Locate Conference 2022On May 24-26, Locate Conference 2022 was hosted in Canberra, Australia. Tersus GNSS showcased a variety of knock-out products and services such as Oscar GNSS Receiver, David30, BX40C OEM GNSS Board, and the satellite-based precise point positioning servic
May 26, 2022Tersus GNSS Participated in Locate Conference 2022On May 24-26, Locate Conference 2022 was hosted in Canberra, Australia. Tersus GNSS showcased a variety of knock-out products and services such as Oscar GNSS Receiver, David30, BX40C OEM GNSS Board, and the satellite-based precise point positioning servic -
 Jul 26, 2022Nuwa V2.3.2.2 New ReleaseRecently, Nuwa V2.3.2.0 has been released. Let’s see what are the highlights of the new version.
Jul 26, 2022Nuwa V2.3.2.2 New ReleaseRecently, Nuwa V2.3.2.0 has been released. Let’s see what are the highlights of the new version. -
 Aug 26, 2022New Dealer Announcement: G360G360 is a firm team with strong technical background. Donald Biggs, who has worked in the surveying and engineering sectors for over 20 years, established the company in 2011. With practical experiences and professional hands-on training services, G360 ha
Aug 26, 2022New Dealer Announcement: G360G360 is a firm team with strong technical background. Donald Biggs, who has worked in the surveying and engineering sectors for over 20 years, established the company in 2011. With practical experiences and professional hands-on training services, G360 ha -
 Oct 20, 2022Tersus GNSS Showcases New Products - Oscar Trek, MVP and LUKA at InterGEO 2022InterGEO 2022 was held in Essen, Germany, on October 18-20. As the largest conference trade fair of geodesy, GEO information and land management, InterGEO connects experts from all over the world to discuss and exchange views on cutting-edge GIS & GNSS te
Oct 20, 2022Tersus GNSS Showcases New Products - Oscar Trek, MVP and LUKA at InterGEO 2022InterGEO 2022 was held in Essen, Germany, on October 18-20. As the largest conference trade fair of geodesy, GEO information and land management, InterGEO connects experts from all over the world to discuss and exchange views on cutting-edge GIS & GNSS te -
 Mar 14, 2023Discover what's new features in Nuwa V2.4.4.0Recently, Nuwa V2.4.4.0 has been released. Let’s see what are the highlights of the new version.
Mar 14, 2023Discover what's new features in Nuwa V2.4.4.0Recently, Nuwa V2.4.4.0 has been released. Let’s see what are the highlights of the new version. -
 Jul 04, 2023Warm Welcome to Our New Nuwa V2.4.5.0Tersus GNSS Inc (“Tersus”) is pleasant to announce to the public that we have already released Nuwa V2.4.5.0 for GNSS receiver recently.
Jul 04, 2023Warm Welcome to Our New Nuwa V2.4.5.0Tersus GNSS Inc (“Tersus”) is pleasant to announce to the public that we have already released Nuwa V2.4.5.0 for GNSS receiver recently. -
 Aug 26, 2024Tersus GNSS Announces Master Distribution Partner for North AmericaToday Tersus GNSS announces master distribution agreement with Desert Creative Group of Twin Falls Idaho.
Aug 26, 2024Tersus GNSS Announces Master Distribution Partner for North AmericaToday Tersus GNSS announces master distribution agreement with Desert Creative Group of Twin Falls Idaho. -
 Sep 12, 2024Connect with Tersus at INTERGEO 2024Tersus GNSS Inc. cordially invites you to attend the prestigious INTERGEO 2024 in Stuttgart, Germany.We will showcase the latest precision positioning service, geospatial technology, and LiDAR achievements.
Sep 12, 2024Connect with Tersus at INTERGEO 2024Tersus GNSS Inc. cordially invites you to attend the prestigious INTERGEO 2024 in Stuttgart, Germany.We will showcase the latest precision positioning service, geospatial technology, and LiDAR achievements. -
 Jan 21, 2025Tersus GNSS Will Present Innovations at Agroexpo 2025 and Geo Week 2025Tersus GNSS is proud to announce our participation in two premier exhibitions this February. These events will spotlight Tersus' advancements in precision agriculture and geospatial technology, showcasing how various solutions shape the future.
Jan 21, 2025Tersus GNSS Will Present Innovations at Agroexpo 2025 and Geo Week 2025Tersus GNSS is proud to announce our participation in two premier exhibitions this February. These events will spotlight Tersus' advancements in precision agriculture and geospatial technology, showcasing how various solutions shape the future. -
 Feb 13, 2025Be a Winner of Pitch the Press at GEO WEEK 2025Tersus GNSS Inc. proudly participated in GEO WEEK 2025, held from February 10-12 in Denver, Colorado, where we showcased our latest advancements in geospatial, airborne, and 3D solutions and delivered groundbreaking technologies that redefine efficiency a
Feb 13, 2025Be a Winner of Pitch the Press at GEO WEEK 2025Tersus GNSS Inc. proudly participated in GEO WEEK 2025, held from February 10-12 in Denver, Colorado, where we showcased our latest advancements in geospatial, airborne, and 3D solutions and delivered groundbreaking technologies that redefine efficiency a














They have different size and pin definitions.
You can enter “log version” via the serial port to get the firmware version.
1. Please check if you selected the correct baud rate when you connect the board to the serial tool.
2. Please check if the serial connection is no problem.
3. Please verify that the board is powered on successfully by checking the power LED.
Please enter “log gpgga ontime 1” via the serial port and see if there is gga message output.
1. If there is gga message but no positioning info in it(all 0 values), please check if the antenna connection is ok. If there is no problem with the antenna connection, there may be something wrong with the antenna connector on the board.
2. If there is no gga message, please enter “log authlist” to check the expire time of the board. If it has expired, please contact the local dealer for a new license.
Enter “log authlist” to check the expire date of the TAP service.
Please provide the info below to your local dealer.
1. Serial number: XXXX
2. L-band Listening Location:
3. L-band Listening Time:
4. License Period:
5. License Property: (demo license/commercial license DCG paid/commercial license DCG unpaid)
The TAP service is turned on by default if the board if the TAP service subscription is valid. You just need to connect to the antenna and place it in an open area, and you can get a fixed solution in 3-10 minutes.
Enter “pppsource tapsat disable” to close the TAP service, and enter “pppsource tapsat enable” to turn it on again.
Enter “log lbandtrackstat ontime 1” to check the bit error rate of the TAP satellites. The last value of the return message represents the Bit Error Rate (BER). In open skies, the BER is 0.000XXX. Under a light canopy, it is 0.00XXXX, and under a heavy canopy, it is 0.0XXXXX. A reading of 0.1XXXXX means the solution cannot be fixed. If the value reaches 0.300000, the L-Band satellite signal is not tracked.
If you are in a open sky, and the BER is still very big, there may be signal interference nearby.
Yes! Tersus PPK solution is platform independent, which does not just mean that it can go from your fixed wing UAV to your Multi-rotor but also means that it operates independently of your flight controller. In fact, there is no connection between the Tersus system and your flight controller, unless you are using your flight controller to trigger event mark in Tersus system or use Tersus system for navigation purpose. So whether you are using an APM, Pixhawk, NAZA, WOOKONG, MICROPILOT, Mikrokopter, Microdrone, or any other flight controller, Tersus PPK solution will still work!
The Tersus David is a cost-efficient, palm-sized GNSS receiver designed for surveying UAVs, AGVs, and agricultural applications. Working with an external GNSS antenna, the free Tersus Survey App and post-processing software, the David GNSS receiver is a low-cost solution for all survey applications, including real-time RTK positioning and data collection for PPK.
For details, please visit: https://www.tersus-gnss.com/product/david-receiver
Using an external antenna together with the free Tersus Survey App and post-processing software, the David GNSS receiver provides a low-cost solution for all survey applications, including real-time RTK positioning and data collection for PPK.
There are 7 different kits for Tersus David.
●David GNSS Receiver Rover Kit Mobile Mode
●David GNSS Receiver Rover Kit with 1W Radio Station
●David GNSS Receiver Rover Kit with 2W Radio Station
●David GNSS Receiver Base Kit Mobile Mode
●David GNSS Receiver Base Kit with 1W Radio Station
●David GNSS Receiver Base Kit with 2W Radio Station
●David GNSS Receiver Base Kit with 35W Radio Station
Tersus David GNSS receiver is currently only compatible with Android smart devices.
Tersus David GNSS receiver can be seamless integrated with any Android smartphones. The Tersus Survey App is available for free.
Generally speaking, there are several main classes of applications that can be used with Tersus David GNSS receivers to attain high-precision positioning details.
●Rover + CORS
●Base + Rover + Radio
●Base + Rover + Tersus NTRIP Caster
●Raw Measurements Collection
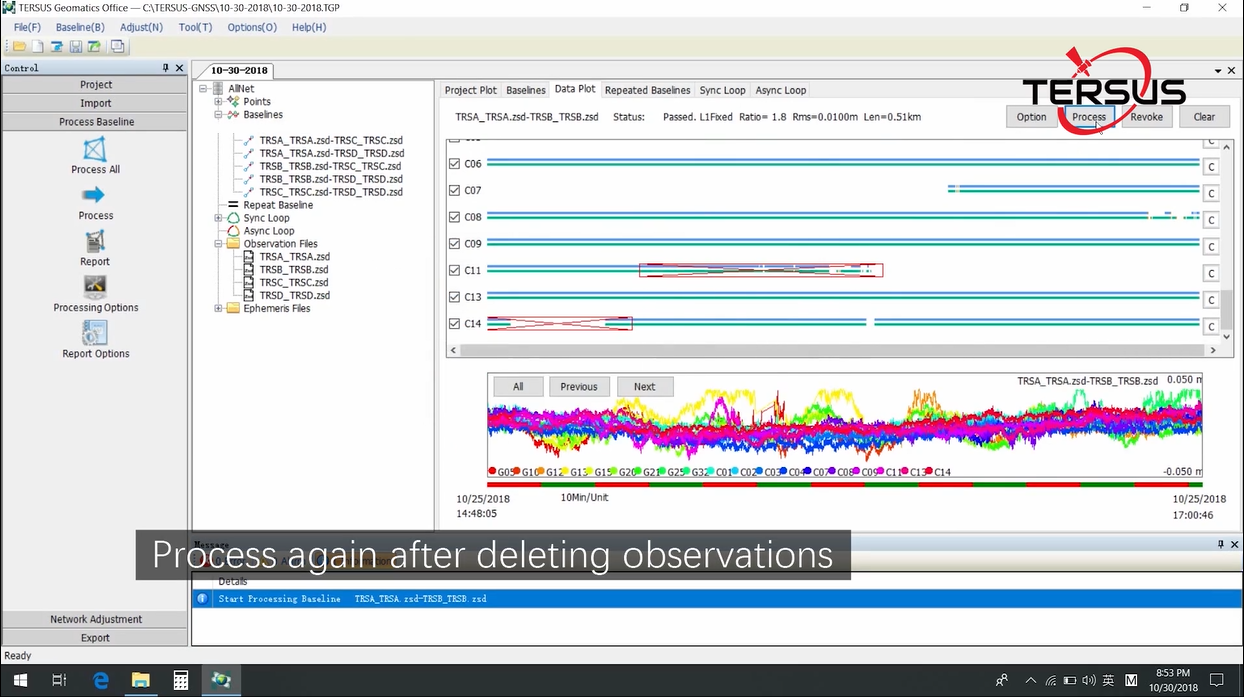
Tersus Geomatics Office is integrated office software to manage and process data for NeoRTK. It is laid out with visualized toolbars and logical icons to easily handle GNSS data processing, baseline processing and network adjustment. It is the software to import, transfer and analyze data.
Tersus offers four kinds of radio modules.
Radio Model | Frequency (MHz) | Power (W) | Transmission Distance (KM) |
| 915MHz small radio | 895-935 | 0.5 | 0.3 |
| 433MHz small radio | 403-470 | 0.5 | 0.3 |
915MHz Eagle radio | 915 | 1 | 3 |
| RS05R radio | 410-470 | 0.5, 1 | 5 |
Oscar-Trek, Tersus's premier visual RTK product, integrates a high-definition camera, lMU, and GNSS for effortless non-contact measurement. It allows users to capture images and measure points in the field or later in the office. The user-friendly design enhances efficiency,
making it ideal for engineering surveying.
For details, please visit: https://www.tersus-gnss.com/product/oscar_trek_gnss_receiver
The resolution is 1920×1200, which is approximately 2.3 MP.
To ensure accuracy, consider the following tips:
(1) Complete the sufficient initialization process.
(2) Ensure the angle between the lines from the camera to the target point is greater than 30 degrees when the target enters or exits the camera’s view.
(3) Walk in a straight line and avoid sudden or sharp rotations of the device.
(4) It is recommended to take at least 6 photos during the measurement process for better accuracy.
(5) Measure in environments with good lighting, wide-open conditions and clear feature points to improve the clarity and reliability of the measurement.
The Tersus GNSS Center is configuration tool for Tersus GNSS products. This software integrates configuration, monitoring, data logging, firmware upgrade and other useful tools. With Tersus GNSS Center, you can communicate over the on-board serial ports, key in commands to configure the board, upgrade firmware, store data, playback data, convert data to RINEX format, display rover’s trajectory in Google/Baidu map, calculate the average position of the base station, view status of the board and positioning results.
For details, please visit: https://www.tersus-gnss.com/product/tersus_gnss_center
Tersus GeoPix integrates the functions of GNSS observation post processing, Event Mark interpolation and Geotagging in EXIF. By clicking one button after input all necessary data, the software provides the result directly as input for image processing software. Tersus GeoPix is a part of Tersus Tool Suite which can be downloaded from Tersus official website.
For details, please visit: https://www.tersus-gnss.com/software
The Tersus PNW software is a high accurate CORS Network management and positioning service software with optimized algorithms independently developed by Tersus GNSS Inc. The software can effectively model errors caused by ionosphere, troposphere and satellite orbit, and precisely estimate correction at the rover. It enables the rovers to achieve fast real-time positioning with centimeter accuracy. The stability and reliability of Tersus PNW software has been approved by maintaining large-scale CORS network.
For details, please visit: https://www.tersus-gnss.com/product/pnw-software
The Tersus GeoCaster is a Networked Transport of RTCM via Internet Protocol (NTRIP) Caster software which allows GNSS correction data such as RTCM corrections to be repeated and sent to different end users via internet. It supports configurable bases online simultaneously and configurable rovers for one base. The end users involve in various areas including surveying, construction engineering, deformation monitoring, automated vehicle, precision agriculture, Unmanned Aerial Vehicle, machine control, robotics, etc.
For details, please visit: https://www.tersus-gnss.com/product/geocaster
The Tersus TC50 Controller is a rugged multi-functional data controller with design of 5'' HD touch screen and an alphanumerical keypad. Equipped with powerful Octa-core processor and android operating system, it is perfect to adapt with Tersus survey software. With professional IP68 rating, it is robust and reliable for harsh operating conditions.
For details, please visit: https://www.tersus-gnss.com/product/tc50-controller
The Tersus TC40 Controller is a rugged smart phone with design of 8'' IPS screen and 1280*800 resolution. Equipped with Android 8.1 mainstream operating system, 8-core 2.0G processor, it is perfect to adapt with Tersus Survey software and run fast. The 9000mAh large capacity battery is detachable, which can work continuously for 10 hours without pressure. The unique rounded corner design and plastic shell are compatible with appearance and protection. With professional IP67 rating, it is robust and reliable for harsh operating conditions.
The Tersus TC20 Controller is a rugged smart phone with design of 4.3'' touch screen and an alphanumerical keypad. Equipped with powerful processor, it is perfect to adapt with Tersus Survey software. With professional IP68 rating, it is robust and reliable for harsh conditions.
For details, please visit: https://www.tersus-gnss.com/product/tc20-controller
Nuwa is a survey application software based on Android OS (Operating System), designed by and all rights reserved to Tersus GNSS Inc. Nuwa is simple, easy to use and has a friendly user interface. It is designed to work with David GNSS receiver, Oscar GNSS Receiver and other receivers which support NMEA-0183.
- Supports Bluetooth and USB connection
- Configure Base, Rover and Static Survey
- Graphical Interface with background map (online/import)
- CAD Stakeout, Road Stakeout and Earthwork
- Data Management (import/export multiple formats)
- Various built-in tools
For details, please visit: https://www.tersus-gnss.com/product/nuwa
It supports three main measurement modes: Angle Measurement, Distance Measurement, and Coordinate Measurement. These modes can be switched using the menu keys.
Save the coordinate file in .csv format to the USB root directory, insert it into the TAS-Z1, and import or export the file via the “Memory MGR” menu.
It comes with two rechargeable lithium batteries, each supporting 16 hours of operation.
In the “Adjustment” menu, select “V0 Adjustment” to adjust by measuring a clear target on both sides, using the horizontal left (HL) and horizontal right (HR) settings.
Use calibration functions such as “Collimation” to adjust the horizontal reading or “H Axis” to adjust horizontal axis errors.
Yes, navigate to the “Star Key” menu and switch the laser pointer on or off under the “Point” option.
Yes, TAS-Z1 supports Bluetooth communication with PCs and mobile devices for bidirectional wireless data transfer.
In the “Parameter” menu, select “Unit Set” to choose between meter/feet/feet+inches for distance, degrees/radians/mils for angle, and units for temperature and pressure.
Remove the battery for separate storage and charge it once a month to maintain battery life. Store the instrument in a dry, shockproof, dustproof, and moisture-proof environment.
It supports importing and exporting .dat, .csv, and .dxf file formats. The .dxf file is compatible with AutoCAD.
After powering on the instrument, press and hold the power key for 1 second, then navigate to the system information page to check details about the motherboard, optical disk, and tilt sensor versions and update dates.
In the “Angle Measurement” mode, select “REP.” to repeat the measurements while aiming at the target multiple times and calculating the average value.
TheDuck™ is an essential, portable marine drone designed for bathymetric surveys of lakes, rivers, and coastal areas. Its highly effective single-beam echosounder makes it ideal for precise data collection.
TheDuck™ is compatible with Android and Windows devices, ensuring versatile control options.
18KG(Maximum Load), 22KG(Normal Weight)
It supports one-key hovering, one-key return, automatic operation, automatic obstacle avoidance, etc.
Support network RTK, radio RTK, and TAP positioning.
Please check the Xlogger.cfg file on the SD card, please contact technical support for the default configuration file.
For support options, please send your product requirements document.
We have two single beam echo sounders, one is 455KHz, which can detect 0.15m to 100m, and the other is 200, which can detect 0.15m to 300m.
The battery for TheDuck™ is a big lithium battery pack (90pcs of 3500mAh cells), 29.6V 31.5Ah, size 250*145*75mm.
TAP (Tersus Advanced Positioning) is a satellite-based precise point positioning service developed by Tersus GNSS, which allows users to achieve centimeter-level high-precision positioning worldwide. With TAP, the GNSS rover receiver will not need to work with the local RTK base station or CORS, but directly receives corrections broadcast by the satellites, such as ephemeris error, satellite clock error, etc.
With only single GNSS receiver, no need Base, no need network, TAP can achieve centimeter-level high-precision positioning worldwide and is particularly significant in marine surveying, precise agriculture, and autonomous driving industries.
Initialization time: <3min
Accuracy: horizontal 15mm and vertical 30mm
Coverage: Global
Service availability: 99.99%
Tersus TAP service is delivered by geostationary satellites(L band) or Internet(back up)
Tersus TAP coordinates are computed in ITRF2020 and the current epoch; Tersus android field collection software Nuwa can configure the frame and epoch conversion parameters to convert the TAP results to the local coordinate system.
No, you may move the receiver while waiting for it to initialize. The initialization time will be similar whether the receiver is static or not.
Activating TAP service is very easy. Simply place the receiver in an open air environment at the designated activation time and ensure it remains powered on to activate it through L-band.
TAP offers flexible subscription options, typically on an annual basis. You can subscribe at any time. Please note that the expiration of the TAP service does not affect the normal functionality of RTK features.
Currently, several OEM boards, including the MX206 and BX50 TAP series, support TAP. Additionally, TERSUS GNSS receivers such as OSCAR-TAP and LUKA-TAP are compatible. More models will be added to TAP support in the future.
The Oscar, ExtremeRTK™ Patented Technology-powered GNSS receiver with calibration-free Tilt Compensation is engineered for challenging environments.
The LUKA GNSS Receiver is a new generation Ultra-compact IMU-GNSS receiver, which is small and light, easy to carry and operate.
RTK involves a stationary base station and one or more mobile GPS receivers, also known as rovers. Provided that the base station has continuous line-of-sight to each rover, it transmits GPS corrections to each in real time using radio waves. If a sufficient number of satellites are visible, RTK can provide a fixed position within centimeter-level accuracy.
RTK stands for Real-Time Kinematic. It refers to the process in which position data is corrected in real-time. In contrast, PPK, or Post-Processed Kinematic, corrects the data after the data collection has been completed.
PPK can offer greater accuracy than RTK, it is widely used for the drones. But there are situations where real-time corrections are preferable, such as in autonomous navigation.
Single: Three-dimensional coordinates computed by the receiver without relying on any differential correction information.
Fixed: When using carrier phase observations for positioning, ambiguities can occur. Theoretically, these ambiguities are integers. Once the integer ambiguities are resolved by the algorithm, positioning accuracy greatly improves.
Float: Sometimes, resolving ambiguity does not result in an integer solution but rather a floating solution.
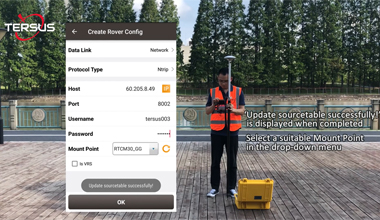
Typically, two popular modes are available: radio mode and network mode, which includes both single base station mode and VRS (Virtual Reference Station) mode.
Yes, RTK can communicate with third-party brands using international general communication protocols, including radio and network protocols, and standard RTCM data transmission. As long as these parameters are compatible, working together is possible.
It depends on the selected working mode, generally a 5-15km radius for radio base stations and a 30-40km radius for network single base stations. If you work in VRS mode within the CORS stations network, there is no need to consider the distance.
High-Precision Static (RMS): - Horizontal: 2.5mm+0.1ppm - Vertical: 3.5mm+0.4ppm
Single Base Real Time Kinematic (RMS): - Horizontal: 8mm+1ppm - Vertical: 15mm+1ppm
Network Real Time Kinematic (RMS): - Horizontal: 8mm+0.5ppm - Vertical: 15mm+0.5ppm
And for tilt survey:
Tilt Compensation Accuracy (No tilt angle limit ): ≤2cm(within 60°)
The Nuwa is field collection software for all GNSS receivers. It is capable of configuring base and rover stations, setting up stake points, stake line, detail survey and handling calculation and conversion for distance, angle and area with COGO.
Tersus Geo Office 2 is a desktop data post processing software based on Windows OS, designed by Tersus GNSS Inc. and all right reserved. Tersus Geo Office 2 (hereinafter referred to as TGO2) has various functions, covering multiple business modules for professional users, supporting GNSS post-processing, online and imported basemap display, road design and inspection, RTK project processing and point clouds data processing.
The Tersus GeoBee30 is a dedicated and cost-effective solution to establish a permanent reference station, to build the CORS network system.
The CORS (Continuously Operating Reference Station) system is a network of multiple fixed GNSS reference stations that provide real-time differential positioning services to improve the accuracy and reliability of GNSS positioning.
The CORS system monitors changes in satellite signals, calculates and publishes differential correction data in real time for users' GNSS receivers to improve positioning accuracy.
This geobee30 system can be connected to Tersus GeoCaster or PNW software for maximum functionality. It can also be connected to third-party software that accept observations in the industry-standard format of RTCM version.
Yes, as long as other brand receivers broadcast industry-standard RTCM data or some public correction formats, they can also be accessed and networked.
GeoCaster software is the common solution and low-cost solution, Tersus operates and maintains the cloud servers and we allow our dealers to use it for free.
It has a WebUI for dealers to manage the reference stations and the users account.
It is a one-stop service, because Tersus will maintain the server and update the GeoCaster software when needed.
The Nearest Base function is also available.
PNW is a powerful network RTK management and positioning service software system. The receiver data receiving module connects the observation data of the base stations to this system. Then, through decoding raw observation data, static baseline calculation, regional error correction calculation and coding, generating the virtual reference stations, etc., the system broadcasts network RTK corrections. At the same time, it has monitoring modules such as ionospheric monitoring (long and short term), single receiver quality data analysis, and other functional modules such as raw data storage and RINEX data storage.
The base station should be located in an open, unobstructed area to ensure good satellite signal reception and reduce multipath effects.
No, you do not need to go to the site. As long as the power supply and network are functioning properly, our Geobee30 system supports remote control. You can configure reference stations from hundreds or even thousands of kilometers away.
We have 2 different ranges of MVP products, MVP-XT32 and MVP-M2X.
The measurement range of MVP-XT32 is 120m, and the measurement range of MVP-M2X is 300m.
MVP-XT32 product support single(Last, Strongest, First) and dual returns.
MVP-M2X product support triple returns.
MVP-XT32: 640000 pts/sec(single return), 1280000pts/sec(dual returns).
MVP-M2X: 640000 pts/sec(single return), 1280000pts/sec(dual returns), 1920000pts/sec(triple return).

The most likely reason that this error is occurring is because your software’s license is not activated. TersusMVPPro should automatically pop up with the 'Tersus PPK License' to allow license activation if it finds one inactive. Once activated, The software will continue to enter the trajectory processing process, prompting the customer to select base data and configuration parameters.
If it does not pop up during processing, search for the 'TersusPPKMain.exe' on your computer to activate a license (default path: C:\TersusGNSS\TersusMVPPro\TersusPPKMain.exe).

Generally, there will be no error message when opening the registration program. If a similar error message appears, it may be caused by missing MSVCR120.dll file in the computer system. You can try to copy this .dll file from another computer, this path: C:\Windows\System32 to the corresponding folder.
Before flying your MVP you should make sure that the 'Vehicle to IMU Rotation' window in the unit's GUI is configured correctly. To determine these offsets, compare the forward flying/moving direction with the forward direction of the payload. Below is the 'Vehicle to IMU Rotation' window; it can be found in the GUI-Settings-Geometry.

Below is the orientation reference of the MVP payload, this is used to determine the yaw pitch and roll offsets for the above window.

Note that the positive direction of the IMU's Y axis is from the IMU through the Lidar. Also note that the MVP is mounted along the Z axis. Most of the rotation offsets will therefore be in the Yaw offset.
Examples of determining the payload's orientation are below. Red is the direction of forward flight, blue are the IMU's axes.

Example: Yaw 0, Pitch 0, Roll 0

Example: Yaw 180, Pitch 0, Roll 0
If there is a data folder on your flash drive but no data (or not all of the data) is in the folder, the most likely cause is poor shutdown procedure. Another flight/drive is required to recover lost data.
When shutting down the MVP payload either on the GUI or with the power buttons, please make sure that you (1) stop the recording (either by pressing the power button once or by pressing 'Stop' on the GUI) and then (2) shut down the device (either by pressing and holding the power button for four seconds or by pressing 'Shutdown' on the GUI). DO NOT remove the MVP's flash drive before stopping recording (good practice is to leave it in until the unit is shutdown). Doing so can cause partial or complete data loss.
If there is only a data folder on your flash drive with data, however there is no TersusMVPPro project, the most likely cause is poor shutdown procedure. Unlike the previous case you may be able to salvage your data still (not 100% of the time)
In order to attempt to salvage your data, open TersusMVPPro using the application on your computer and select 'New Project' in the upper left corner of the window. Select ALL of the data files in the data folder. If your data is salvageable, TersusMVPPro will begin to process your data. Again, unfortunately this does not work 100% of the time and you may have to re-fly/re-drive to recover your lost data.
If you are flying at high altitudes with long stretches of no acceleration (straight line and constant velocity), you may notice that there is some drift in your heading data. In order to prevent this from occurring, try adding some dynamics into your flight. This could include changes in altitude, speed, or path. Introducing dynamics into the flight will help the IMU correct any heading drift.

This may be caused by a bug in the old firmware version; you can check whether the firmware version is the latest one. Contact the technical team for the latest firmware, and refer to chapter 5.3.5 of the MVP LiDAR Payload User Manual to learn how to update it.
Check whether the values of Vehicle to IMU rotation offsets in MVP GUI interface is correct before flight/drive.
If the above two possibilities have been ruled out by yourself, the issue may be related to the computer's graphics card. Please contact the technical team and describe the details of the problem for help.
If you have produced your colorized *.las file and it is completely black, you have done one of the following two things:
Left the camera lens cap on, and thus the camera took pictures of the inside of the lens cap (so nothing but black)
Not connected (or not correctly connected) the camera to the IMU
Neither of the above issues can be remedied in post processing, and so another flight/drive is required to recover the lost data. Below I will explain ways to prevent both from happening in the future.
For the lens cap, make it a habit to check that the camera lens cap is off of the device when you turn on the payload. You will already be near the device, and turning on the payload and taking the cap off of the camera will become habit in just a few flights/drives.
To ensure that your camera is connected, listen for two camera clicks when turning on your device, as well as a steady consistent click once you start recording. Additionally, if your camera and its serial number is visible in the GUI (under the Lidar on the Status page), your camera is correctly connected.
Remove the default path first under 'LiDAR Tools>Paths'. Then, select portions of the trajectory to be included in the final LAS by right-clicking on a part of the trajectory and selecting 'Start selection here' as shown in following figure. Selection ends are marked by white diamonds.

After you have selected the starting point for the desired path/trajectory selection, find the location on the trajectory for the desired end point of that path. Right-click this location and select 'Finish selection here'.
After finishing this step, TersusMVPPro will load and display the corresponding geo-referenced laser points of this selected path, continue colorizing and exporting.
When ≥2 paths on the interface and ≥2 paths are displayed in the 'LiDAR Tools>Paths' function list, the export will provide the 'export by path' option, and each path will export a *.las file.
When only 1 path is on the interface and displayed in the 'LiDAR Tools>Paths' function list, there is no path option for export, and the point cloud *.las file under the selected tractory is exported by default.